
 资讯
资讯


两种类型的“机器人”驾驶:自动驾驶和(hé)DARPA机器人比赛(sài)
但是(shì)人形机器人驾驶汽车的研(yán)究也是有很重要的意义的:2015年(nián)在美国举办的DARPA机器人挑战赛里(lǐ)就(jiù)有一项(xiàng)机器人充当(dāng)司机驾驶吉普车的任务。小编私以为,研究人(rén)形机器人可以(yǐ)提升人形(xíng)机器人的功能性,驾(jià)驶作为一个需要综合多(duō)方面因素的(de)任务(集合机器人设计(jì),运动控制,人工(gōng)智能算(suàn)法等),可(kě)以很好的作为(wéi)一个特定的研究课题(tí)来提升(shēng)人形机器(qì)人的综合性能;另(lìng)外,研究人形机器人(rén)驾驶还(hái)将成(chéng)果转移到开发相应的机械臂(bì)或者机械腿,来为(wéi)肢(zhī)体有残(cán)缺的人士提供可靠的功能性的智能义肢,让(ràng)他们能够拥有和其他(tā)人一(yī)样的生活和(hé)运动能力。
 portant;" />
portant;" />
呆(dāi)萌的(de)老司机Musashi人形机器(qì)人
近期来自日(rì)本东京大学的研究团(tuán)队基于他们之前的(de)人(rén)形(xíng)机(jī)器人的研究,研发了一款(kuǎn)用(yòng)于驾驶汽(qì)车的人形(xíng)机器人司机,并将研究成果刊登于国(guó)际机器人期刊《IEEE机器人与自(zì)动化杂志(zhì)(Robotics and automation magazine)》,论文信息请看文末(mò)。这位机器人老司机(jī)名叫Musashi,不同于大多数人(rén)形(xíng)机器人依靠关节电机(jī)驱(qū)动,Musashi被设(shè)计为具有像人一样的(de)肌肉-骨骼结构。他全神具(jù)有74块人工肌肉,以及(jí)39个关节(不包括手部的关节)。而(ér)本研究的亮点也就是尽量模仿人类的动作和功能来实现机器(qì)人的自动(dòng)驾驶。(东京大学(xué)的人形(xíng)机器人团队曾经于(yú)2017年刊登一篇《科学机器人学(xué)》(Science Robotics)封面文章,详细讲(jiǎng)解了他们(men)的(de)“肌肉-骨骼(gé)”人形机器人系统设计,感兴趣的可(kě)以参考文末的论文链接(jiē)。)
我们先(xiān)来欣赏一下“机(jī)器人老(lǎo)司机(jī)”的一些镜(jìng)头(tóu)!文末附有完整的视(shì)频。在(zài)下一(yī)部分会为大家介绍如(rú)何(hé)设计以及实现人形(xíng)机(jī)器人驾驶(shǐ)。
 portant;" />
portant;" />
单手玩儿(ér)方向盘,不安全(quán)噢!
 portant;" />
portant;" />
双手转方(fāng)向盘(pán),这才是正(zhèng)确操作吧!
 portant;" />
portant;" />
踩油门
 portant;" />
portant;" />
细节动作:拧钥匙,拉手刹,打转向灯
 portant;" />
portant;" />
后视(shì)镜识别(bié)人
 portant;" />
portant;" />
培训完成,老(lǎo)司机上路(lù)啦!
二. 类人机(jī)器人的“骨骼(gé)肌肉”系统设计(jì)以及控制
“肌肉-骨骼(gé)”机器人Musashi模仿人类(lèi)的身(shēn)体结构设计和制造,具有冗余的(de)传感器和柔性的(de)身体结构。这些特性非常适合在复杂(zá)的环境中交互,例如在狭小(xiǎo)的汽(qì)车中驾驶的行为。研究者期望设计的(de)机器人能够坐到汽车座位中,并且(qiě)可以用脚踩(cǎi)刹(shā)车和(hé)油门,同时可以(yǐ)用双(shuāng)手操作方向盘。为了(le)实现上述的(de)目的(de),研究者(zhě)需(xū)要从硬件和软件等多个方面综合设计这款(kuǎn)机器人(rén),具体包括:1. 机器人(rén)身(shēn)体比例;2.机器人身体的柔性;3. 冗余传感系统和一个可以控制(zhì)机器人“智能(néng)系统(tǒng)”。
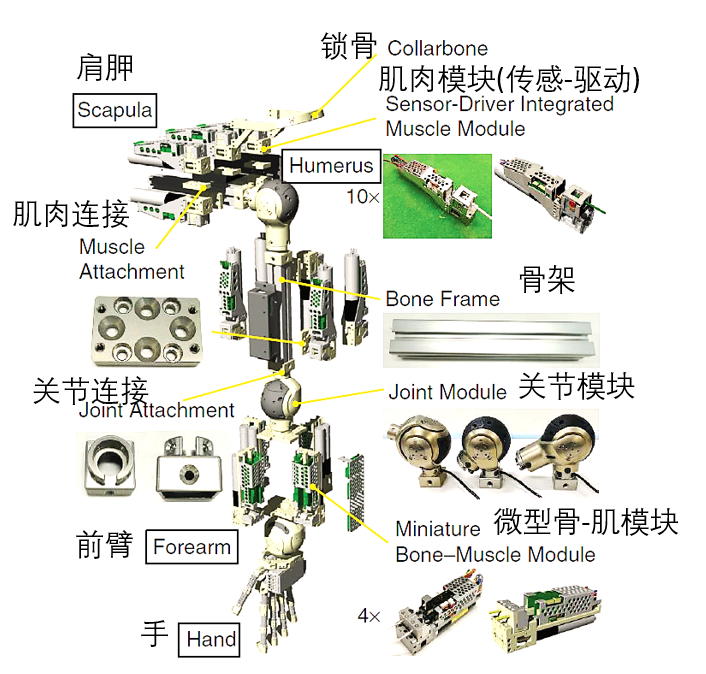
研(yán)究者对Musashi的(de)肌肉模块(kuài)驱动器进行(háng)了重点设计(jì)和研发。柔性的“人工肌(jī)肉”是本研究中的硬件核(hé)心所在。肌肉模块是由(yóu)电(diàn)机通过滑(huá)轮绕(rào)线驱动,为了让机器人有一(yī)定(dìng)的自体(tǐ)柔(róu)性,研究者们在每一个“人工肌肉”末端添加(jiā)了一个非线性弹性单元(NEU)。非线性弹性单元由(yóu)一个(gè)纤维增强的弹性圈充当,自身具有柔性,非常适合(hé)于(yú)环境(jìng)交互。每一个肌(jī)肉驱动单元都含有可以测量(liàng)肌肉张力(lì),肌肉温度以及肌肉长度的传(chuán)感器。肌肉模块连接到(dào)骨架上,非线性弹性单元连(lián)接到肌(jī)肉末(mò)端。像人类一样,Musashi的关(guān)节由一对肌(jī)肉模块以对(duì)抗(antagonistic)的(de)形式安装驱动。
 portant;" />
portant;" />
驱动单元设计
机器人(rén)的手臂(bì)结构如图,Musashi的手臂(bì)基(jī)本上是(shì)按照人(rén)类(lèi)的手臂进行设(shè)计。并且进行了模块化(huà)设计和组装。它(tā)的(de)其余部分(例如腿部)等需要肌肉驱动的关(guān)节都可以利用模块化设计组装。在机器人的每(měi)一个关节里包(bāo)含(hán)有位置传感(gǎn)器,IMU等传感器(qì),能够读取到每一个关节的角度和姿(zī)态。
 portant;" />
portant;" />
机械手模块化设计说明(míng)
 portant;" />
portant;" />
变刚度手臂
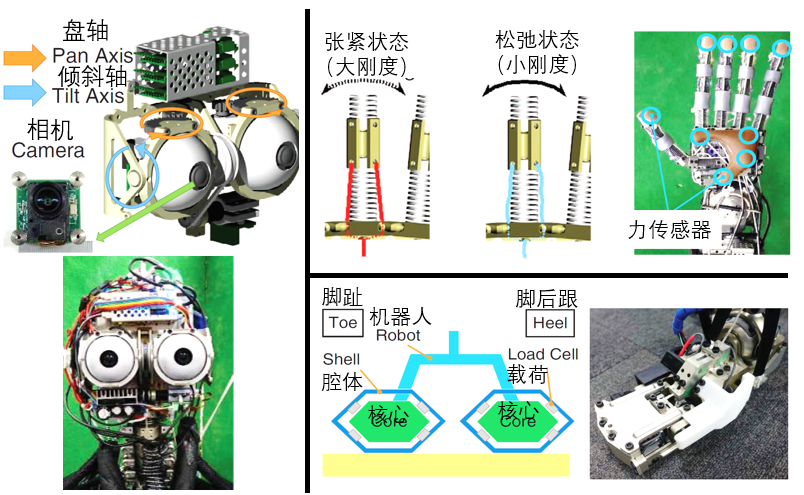
为了(le)尽可能的模仿人(rén)类驾(jià)驶(shǐ)员的特性,研究者没有采用3d扫描传感器,而是在Musashi的头部具有两(liǎng)只可动2维摄像机充当(dāng)眼睛,可以左右和上下旋转,主要作(zuò)用(yòng)是采(cǎi)集图像信息用于识别。
Musashi的手指(zhǐ)采(cǎi)用弹簧柔(róu)性结构设计。当两(liǎng)边线都(dōu)收紧(jǐn)式,手(shǒu)指处于大刚度(dù)状态。这(zhè)款(kuǎn)机械手在冲(chōng)击(jī)下不会被损坏,另外在指尖(jiān)部位和(hé)手掌部分(fèn)都有用来检测接触(chù)的压力传感器(qì)。
Musashi的足(zú)部有(yǒu)着6维力传(chuán)感器,分(fèn)别分布在脚趾和脚后跟处,可以(yǐ)全面(miàn)感(gǎn)知脚受到(dào)的(de)力的大小和方向。
 portant;" />
portant;" />
细节设计:眼部设计,变刚(gāng)度机械(xiè)手,足部传(chuán)感
借助于高度拟人化的硬(yìng)件设计(jì),Musashi可以实现以下功(gōng)能和动作(zuò)。首先它(tā)可(kě)以完美的坐到一部小型家用电动车中。可以(yǐ)通过头部和眼球的转动识(shí)别周围的环境,例如通过后视镜的(de)反射可(kě)以识别人类;柔性(xìng)机(jī)械臂和机械手可以抓握方向盘并且进行转向(xiàng)操作。
 portant;" />
portant;" />
基本动作和功能:后视镜(jìng)人像识(shí)别和双手转方向盘
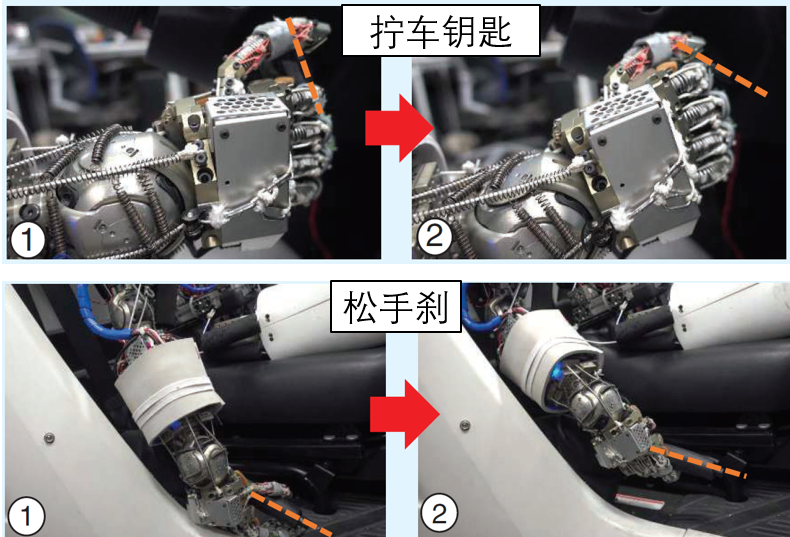
另(lìng)外Musashi也可以完(wán)成例如拧车钥匙,以(yǐ)及拉手刹等在驾驶过程中(zhōng)一些必备的,看似简单,实际(jì)对(duì)大多(duō)数(shù)机(jī)器人来说比较难以在狭小(xiǎo)空间完成(chéng)的基本动作。
 portant;" />
portant;" />
基(jī)本动(dòng)作:拧车钥匙和拉手刹
借助于足部的传感器和腿的设计,Musashi可以实现踩油门(mén)和(hé)踩刹车的功能(néng)。另外当足(zú)部上方被刹车油(yóu)门(mén)卡住(zhù)后,力传感(gǎn)器可以检测出,从而让Musashi做出反应,避开(kāi)刹车(chē)油门的干扰。
 portant;" />
portant;" />
基本动(dòng)作:踩(cǎi)油门,踩刹车
在(zài)具备了柔性的身体结构和冗余传(chuán)感信(xìn)息,为了实现机器人(rén)驾驶汽车的功(gōng)能,研究(jiū)者(zhě)们采用一种基于(yú)机(jī)器学习(learning based)的(de)运(yùn)动生成,基于(yú)机器学习的(de)识别(bié),以及(jí)基于快速反射弧的控制方法,详细的(de)机器学习算法请参照具(jù)体论文。
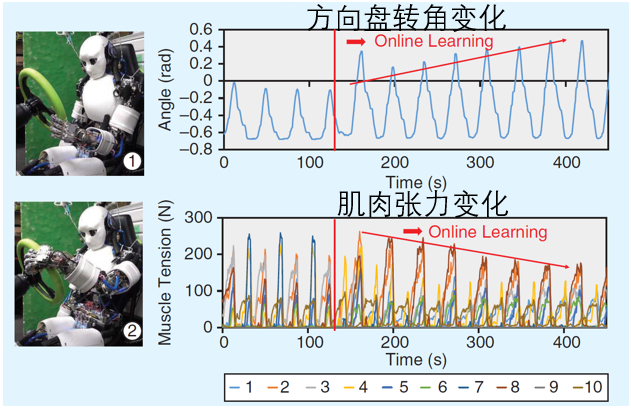
研究者规定了一些基本的驾驶汽车的动作,将他们分(fèn)为(wéi)两种类别,静态行(háng)为和动态行为。静态行为指的是转(zhuǎn)方向盘,研究者用在线学习的(de)方式,训练(liàn)机(jī)器人掌握(wò)操作(zuò)方向盘(pán)的行为,图中显示出(chū)了方(fāng)向(xiàng)盘角度和肌肉张力随着时间(jiān)的变化(huà)规律。
 portant;" />
portant;" />
转方向(xiàng)盘(pán)在线机器学(xué)习(xí)
踩油门(mén)和刹车是需要机器(qì)人做出快速(sù)响应的,例如在红绿灯状态下的启动和刹车,以及在前方有行人(rén)时的刹车。研究者采(cǎi)用离线学习的方式来训练机器人的动态响应。
 portant;" />
portant;" />
踩油门训练
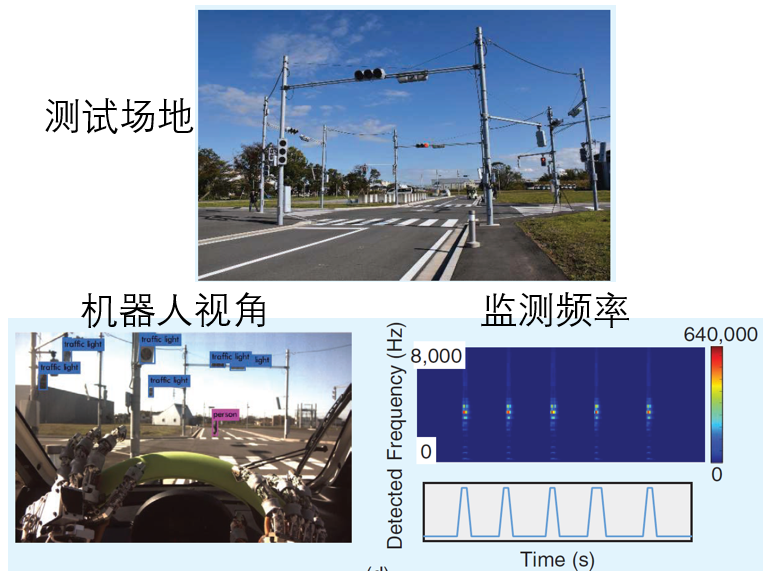
在识别部分,像人类(lèi)驾驶员一样,研究者主要利用机器(qì)学习训练识别了视觉和声音信息(xī),通过训(xùn)练,可(kě)以(yǐ)识别物体信息和(hé)声音信息,例如,汽车,人,交通灯(dēng),以及喇叭声等。研究者进行测(cè)试的(de)场地是在(zài)车人非常稀少的(de)街道(dào)上。
 portant;" />
portant;" />
测试场地和机器人视觉识别
Musashi驾驶一(yī)辆小型改装的电动车进(jìn)行试(shì)验(yàn)。其中,能源和计算机控制中枢都(dōu)被安装于(yú)车厢尾部,另外(wài)还(hái)包括一(yī)个无线通讯模块。为了安全(quán)起见,该车(chē)辆的电机扭矩被限制在5Nm之内,同时有一(yī)个应急按钮以防止(zhǐ)出危险。
 portant;" />
portant;" />
驾(jià)驶汽车上配置电源和计算机
Musashi可以通过(guò)简(jiǎn)单的反射弧控制算法来对外界(jiè)做出反应。研究者(zhě)展示了一个很经典的场景,即在车辆前方有人或者(zhě)汽(qì)车通过时,快速踩下刹(shā)车做出反应。基于Musashi的识别(bié)系统,它可以有效地识别(bié)在前(qián)方通过的(de)人,以及即将到来的汽车,并(bìng)做出(chū)反应。研究者指(zhǐ)出,为了让机器(qì)人的控(kòng)制系统更加智能,在更多的环境中去训练机器人的识别模(mó)型(xíng)时非常有必要的。
 portant;" />
portant;" />
驾驶过程中(zhōng)的鸣笛(dí)声或者人类检测
另一个测试场景是让Musashi自动驾(jià)驶通过一个有着红绿灯(dēng)的(de)十字路口。在这(zhè)项实验中,Musashi的(de)驾(jià)驶速度非常(cháng)的缓慢(5km/s)。当十字(zì)路口的等变(biàn)为绿(lǜ)色(sè)时,操作人员对(duì)机器(qì)人发出(chū)转弯的指令,Musashi可以(yǐ)驾(jià)驶小(xiǎo)车(chē)用(yòng)双手实现90度的转弯。整(zhěng)个过程持续(xù)大约2分(fèn)钟,相对来说比较缓慢和(hé)不(bú)流畅。
 portant;" />
portant;" />
驾驶过程中的(de)红绿灯检测
三. 总结与未来展望
虽然自动(dòng)驾驶汽车要比(bǐ)用“人形机器人”驾驶汽车更(gèng)为可靠,更舒适(shì),更安全,但是小编相信,对于“人形(xíng)机器人“的诸如此类的深入研究还是有(yǒu)很重要和深(shēn)远意义的(de)。驾驶汽车这项(xiàng)任(rèn)务(wù)将机器人(rén)束缚在一个极其复(fù)杂的环境(jìng)中,需要机(jī)器人去操作(zuò)方向盘,踩(cǎi)油门,拉手刹,拨转(zhuǎn)向灯等。无疑来(lái)说(shuō)是一项很(hěn)有挑战性的任(rèn)务。进行(háng)相关的研究可(kě)以极大的促进”人形机器人“的发(fā)展(zhǎn)。
本(běn)文的(de)研究者指(zhǐ)出,当前的研究还有(yǒu)很多方(fāng)面(miàn)需要(yào)改(gǎi)进,例如在脚踏板的操(cāo)作和方向盘的操作方面,都不够顺滑(huá),以及速度较慢,远远没有(yǒu)办法和人类进行比较。同时(shí)机(jī)器人(rén)的识别(bié)模型还(hái)需要进(jìn)一步的完善和强化,以适(shì)应更(gèng)复杂(zá)的环境。在未来的研究中,研究者会考虑让机器人(rén)尝试不同的汽车,从而(ér)进(jìn)一步提升人形(xíng)机器人的性能。
相关(guān)论文信(xìn)息:
Kawaharazuka, K., Tsuzuki, K., Koga, Y., Omura, Y., Makabe,T., Shinjo, K.,Kawasaki, K. (2020). Toward Autonomous Driving byMusculoskeletal Humanoids: Study of Developed Hardware and Learning-basedSoftware. IEEE Robotics & Automation Magazine.
东京大学(xué)人形机器人论文(wén):
Asano, Y., Okada, K., & Inaba, M. (2017). Designprinciples of a human mimetic humanoid: Humanoid platform to study humanintelligence and internal body system. Science Robotics, 2(13),eaaq0899.











息(xī)")
信息举报中心")
络110")